F2B mit höherer Leistung

Vorbemerkungen
Im Horizontalflug entspricht der erzeugte Schub des Propellers der Summe der Luftwiderstände des Modells und der Kabel; das System ist im Gleichgewicht. Wird nun der Luftwiderstand des Modells, zum Beispiel durch das Ausfahren von Klappen und/oder durch die Erhöhung des Anstellwinkels, erhöht, so wird das Modell abgebremst und die dadurch reduzierte Geschwindigkeit verringert den Leinenzug. Da unsere Modelle in engen Kurven (Ecken) schon einmal einen um Faktor 10 höheren Auftrieb liefern müssen, steigt der induzierte Luftwiderstand kurzzeitig ganz beträchtlich an. Ein Motor welcher beim Anstieg des Widerstandes die Leistung erhöht ist deswegen Voraussetzung. Gute Verbrennungsmotore, vor allem wenn sie genügend grosses Drehmoment liefern, erfüllen diese Voraussetzung und ziehen das Modell ohne grossen Geschwindigkeitsverlust durch die Manöver.
Auch mit einem elektrischen Antrieb der genau dann hohes Drehmoment liefert, wenn der induzierte Luftwiderstand infolge hohem Auftriebsbedarf in einer Ecke stark zunimmt, sollte es möglich sein den Verlust an Geschwindigkeit (= Leinenzug) in komplizierten Manövern zu reduzieren. Da ein Elektromotor so betrieben werden kann, dass die Leistungszunahme bei grösserem Widerstand praktisch verzögerungsfrei einsetzt und da die quantitative Zunahme der Leistung lediglich durch die an Bord mitgeführte Energie begrenzt wird, sollte es möglich sein sehr hohe Dynamik, also den Bereich zwischen der Leistung im Horizontalflug und der Leistung in harten Manövern, zu erreichen.
Auf Grund dieser Überlegungen habe ich versucht einen Elektroantrieb auszulegen welcher mittels verzögerungsfrei verfügbarer, hoher Leistung den Geschwindigkeitsverlust in Manövern gering hält. Um den gewünschten Effekt zu demonstrieren, und weil das zur Verfügung stehen Flugzeug etwas gar schwer war (!), habe ich einen etwas überdimensionierten Motor eingesetzt und mit diesem einen sehr grossen Propeller so angetrieben, dass erheblicher Standschub (mehr als 3.5 Kg) zur Verfügung steht. Hier die Eckdaten meiner Versuchsanordnung:
Retro Enforcer E
Fläche: 42 qdm
Gewicht: 2'290 Gramm
Schwerpunkt: 21% mittlere Flächentiefe
Kabel, Oese - Oese: 0.38/19-fach 19.5 m
Geschwindigkeit: 5.3 Runde
Laufzeit: 5" 30"
Motor: Hyperion 4020 8-Turn 777Kv
Propeller: APC E 15 x 6
U/Min: 7850, geregelt
Regler CC Phoenix ICE 75 lite, controlline mode, high rpm governor, data logger
Max. Regler Temperatur: 65 C
Timer: Hubin FM-9
Batterie: 4000 mAh 4S 14.8 volts
Leistung im Horizontalflug: 400 Watt
Höchste Leistung im Manöver: 750 Watt
Spitzenstrom: 56 Amp
Energieverbrauch: 3000 mAH
Dazu noch diese Vergleichszahlen:
Antrieb Retro E. 923 Gramm
Antrieb PA .75, mit Treibstoff: 767 Gramm
Antrieb PA .75, mit Treibstoff: 720 Gramm
Das Flugzeug fliegt, trotzt durchaus beachtlichem Gewicht, ganz erstaunlich gut. Der Antrieb zieht das Modell auch durch kritische Manöver ganz ruhig und sicher durch. Sehr harte Ecken gehen nicht so gut, allerdings ist es dennoch gut möglich, die beiden oberen Ecken in der Sanduhr akzentuiert zu fliegen.
Alles in Allem ein sehr interessanter und äußerst lehrreicher Versuch. Neben dem souveränen Durchzug faszinieren mich vor allem der freie Zugriff zu allen relevanten Eigenschaften des Antriebes sowie die Präzision und Reproduzierbarkeit mit der alle Änderungen umgesetzt werden. Es ist schon beruhigend zu wissen, dass eine Drehzahländerung von beispielsweise 180 U/min mit absoluter Zuverlässigkeit haargenau eingehalten wird. Wenn sich meine bisherigen, noch sehr begrenzten Erfahrungen bestätigen, dann könnte es vielleicht sein, dass in Zukunft etwas weniger Einstell- und Testflüge notwendig sein werden. Um das genauer herauszufinden baue ich jetzt erst einmal ein Wettbewerbsmodell
Hier noch einige allgemeine Information zum Thema:
Seit einiger Zeit stehen uns verschiedene Bauelemente, sogenannte "Timer", zur Verfügung welche sowohl die Leistung als auch die Laufzeit eines Elektromotors steuern. Sie tun dies, indem sie an den genormten Drosseleingang eines handelsüblichen Reglers während einer vorwählbaren Zeit ein Signal zur Einstellung der Leistung anlegen. Damit können wir heute aus dem grossen Angebot der Industrie auf Standardkomponenten wie Motore, Regler und Batterien zugreifen und so, mit Teilen aus dem lokalen Angebot, einen F2B Antrieb konzipieren. Einzig der Timer bleibt als speziell für Fesselflug gebautes Teil gesondert, z.B. über Internet, zu beschaffen.
Der Timer

Ein einfache Timer, er ist für weniger als 20 € zu bekommen und wiegt gerade einmal 10 Gramm, ermöglicht die stufenlose Einstellung der Motorleistung in einem Bereich von 65 100% und die Wahl der Laufzeit zwischen ca. 2 und 6 Minuten. Darüber hinaus bietet er eine feste Startverzögerung von 25 sec, ein fest programmiertes Hochlaufen auf die eingestellte Leistung und eine Anzeige kurz vor dem Abstellen des Motors. Darüber hinaus enthält der FM-0c Timer von Will Hubin (e-mail: whubin@kent.edu) eine fest programmierte Funktion welche den Spannungsabfall der Batterie über die Entladezeit einigermassen kompensiert. Der Timer ist kompatibel mit jedem Regler welcher einen 5 Volt BEC hat. BEC ist die Spannungsversorgung für Empfänger, integriert im 3-poligen Kabel zum Empfänger.
Für anspruchsvollere Anwendungen gibt es bei Will Hubin den digital programmierbaren FM-9 Timer. Dieses Steuermodul kostet nur ca. 10.-$ und wiegt lediglich 5 Gramm. Es erlaubt, mit Hilfe eines zusätzlich benötigten Programmiergerätes für 75.- $, die Vorwahl von Betriebsart, (abhängig vom nachgeschalteten Regler), Startverzögerung und Drehzahl. Um Einstellungen im Feld zu ändern, wird das batteriebetriebene Programmiergerät am Timer angesteckt und es führt dann den Benutzer, mittels eines selbsterklärenden Menüs, durch die Einstellungen. Das Programmieren einer anderen Drehzahl ist so eine Sache von weniger als einer Minute. Diese wird vom entsprechend programmierten Regler anschliessend mit einer Toleranz von weniger als +/- 20 U/Min eingehalten
Der Regler
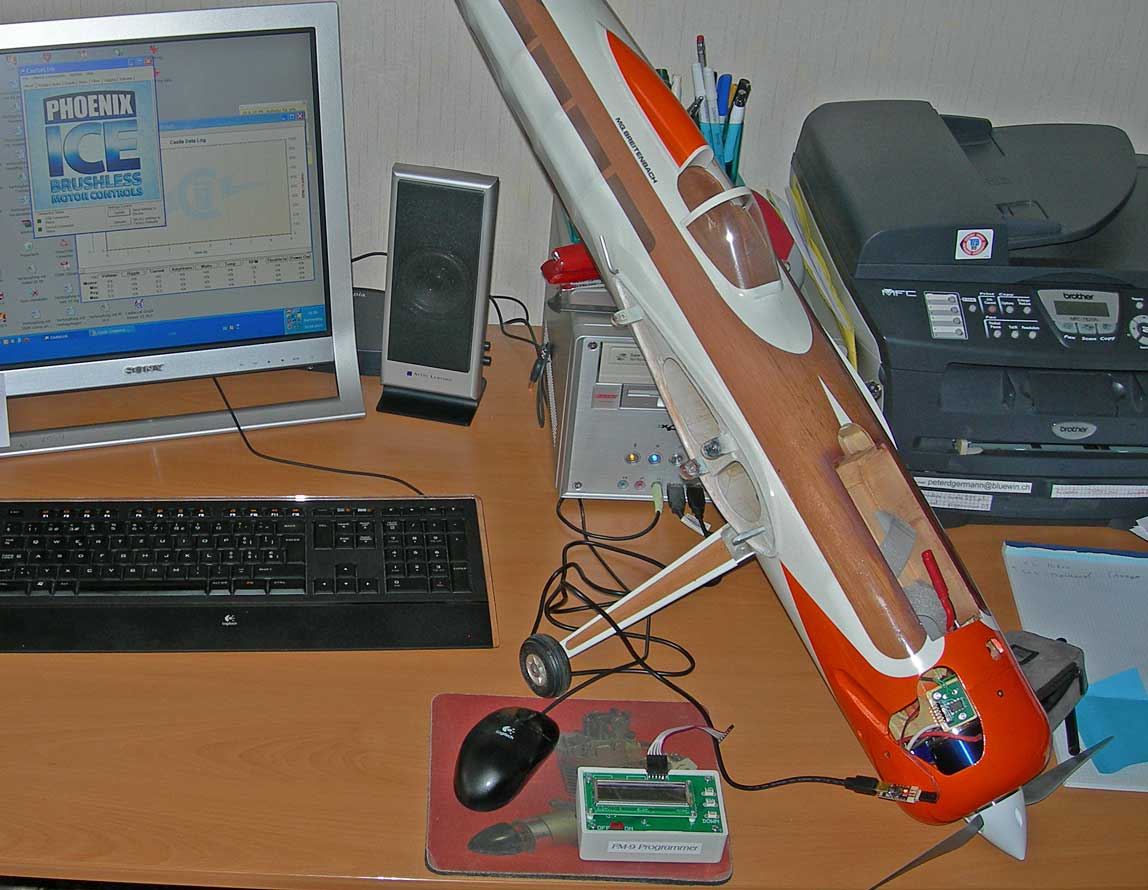
Ein Regler (ESC) zur Speisung von bürstenlosen Drehstrommotore erzeugt, ausgehend von einer Gleichspannung, 3-phasigen Drehstrom variabler Leistung. Die jeweils benötigte Leistung wird dem Regler vom Empfänger der Fernsteuerung in Form verschieden breiter Rechteckimpulse übermittelt. Die im Fesselflug verwendeten Timer bilden diese Rechteckimpulse nach. Einfache Regler beschränken sich auf diese Funktion. Komplexere Regler lassen sich für verschieden Anwendungen programmieren. Sie werden dazu mit einem PC verbunden und können so sehr detailliert dem Einsatzprofil angepasst werden. Ein interessantes Beispiel eines solchen modernen Reglers ist der Phoenix ICE von Castle Creations: http://www.castlecreations.com/products/phoenix_ice.html
Neben sehr vielen Einstellmöglichekeiten, darunter sogar eine "Controlline" Funktion, speichert dieser Regler während dem Flug eine Reihe von Daten wie z.B. Drehzahl, Spannung, Strom, Temperatur, usw. und stellt diese anschliessend via eine USB Schnittstelle zur graphischen Auswertung zur Verfügung. Zwei Sachen gibt es bei allen Reglern zu beachten:
Dazu noch diese Vergleichszahlen:
Die grösste Verlustwärme im Regler tritt im Teillastbereich, nicht bei Vollgas, auf. Da wir bei F2 Anwendungen genau in diesem Teillastbereich arbeiten, ist der Regler grosszügig zu dimensionieren und es ist unbedingt für genügende Kühlung zu sorgen.
Die meisten Regler haben eine Abschaltautomatik die bei einer Mindestspannung von 3.00 Volt pro Zelle der LiPo Batterie anspricht. Diese Mindestspannung ist für sicheren Betrieb der Batterie über möglichst viele Lade/Entlade Zyklen zu gering. Es wird empfohlen, bei programmierbaren Reglern, die minimale LiPo Spannung auf 3.3 Volt einzustellen und fallweise die Batterie und den Propeller so zu dimensionieren, dass eine Entladung unter 3.3.V zu vermieden wird.
Der Motor
Da wir direkt angetriebene, relativ langsam laufende Propeller betreiben, haben sich bürstenlose Aussenläufer Motore gut bewährt. Diese Motoren entwickeln mit zunehmendem Durchmesser beachtliche Drehmomente bei Drehzahlen welche, in unserem Bereich, unter 10'000 U/min liegen. Eine Eigenschaft des Elektromotors ist Tatsache, dass sein Drehmoment (fast) beliebig gesteigert werden kann und in der Praxis nur durch Fähigkeit der Batterie genügend Strom zu liefern begrenzt wird. Dies ist für uns besonders dann interessant, wenn es gilt verzögerungsfrei kurzfristig hohen Luftwiderstand, zum Beispiel beim Durchfliegen einer scharfen Ecke, zu kompensieren. Wird in ein vorgeschalteter Regler so betrieben, dass er die programmierte Drehzahl fest einhält, dann kann man bei der Auswertung nach dem Flug feststellen, dass die Motorleistung in einem Manöver schon einmal um den Faktor 2 erhöht, also verdoppelt, wird. Vollautomatisch, exakt reproduzierbar und innerhalb von Sekundenbruchteilen.

Zur Dimensionierung des Motors kann, vereinfachend, sein Gewicht herangezogen werden. Aussenläufer im Bereich von 190 300 Gramm sind für übliche F2B Modelle ausreichend, wobei auf eine möglichst geringe, spezifische Drehzahl geachtet werden sollte. Diese, ausgedrückt in Umdrehungen pro Volt angelegter Spannung (kV), sollte nicht höher als 900 sein, d.h. bei einer Spannung von 14.8 Volt bzw. 4 Zellen Lipo) würde der Motor maximal 13'320 U/min drehen. Bei wesentlich höheren Drehzahlen wird der Motor durch die dann notwendige Drosselung über den Regler unwirtschaftlich betrieben und zudem steigt die Verlustwärme im Regler stark an.
Auf dem Internet gibt es ein Programm zur Dimensionierung elektrischer Antriebe: http://www.ecalc.ch/motorcalc.htm?eflight
Es ist zwar für Fernlenkmodelle ausgelegt, kann aber auch uns sehr gute Dienste leisten. Vor allem dann, wenn man den mit einer bestimmten Konfiguration erreichbaren Standschub als Zielgrösse betrachtet und als Vergleichswert den Standschub von ca. 2'900 Gramm eines PA .75 annimmt. Um in diesem Programm die Drehzahlen zu manipulieren, muss man die spezifische Drehzahl des Motors (Pulldown Menü "andere", kV) so lange verändern bis die gewünschte Motordrehzahl erscheint.
Die Batterie
Über Lipo"s kann in der Literatur und auf dem Internet beliebig viel nachgelesen werden. Es macht Sinn, sich mit dieser Hochleistungsbatterie vertraut zu machen, da korrekter Gebrauch und Lagerung durchaus sicherheitsrelevant sind. Für F2B Anwendungen hier einige Eckdaten:
Spannung: 11.1 oder 14.8 Volt, das heisst (bei 3.7 V / Zelle) 3 oder 4 Zellen
Maximale Kapazität: 3'000 bis 4000 mA/h
Verfügbare Kapazität: 75% bzw. 2'250 mA/h bis 3'000 mA/h
Max. Entladestrom, dauernd: 20 C, das heisst das 20-fache der Kapazität, bzw. 60 bis 80 Ampère
Max. Ladestrom: 1.5 C, das heisst das 1.5-fache der Kapazität, bzw. 4.5 bis 6 Ampère
Lagerung: Geladen bis auf ca. 50% Kapazität (nicht entladen und nicht geladen)
Betriebstemperatur vor dem Flug: nicht unter 20
Lebensdauer: ca. 200 Entlade/Lade Zyklen (Nur mit einem entsperchendem Ladegerät)
Peter Germann, 13. Oktober 2010